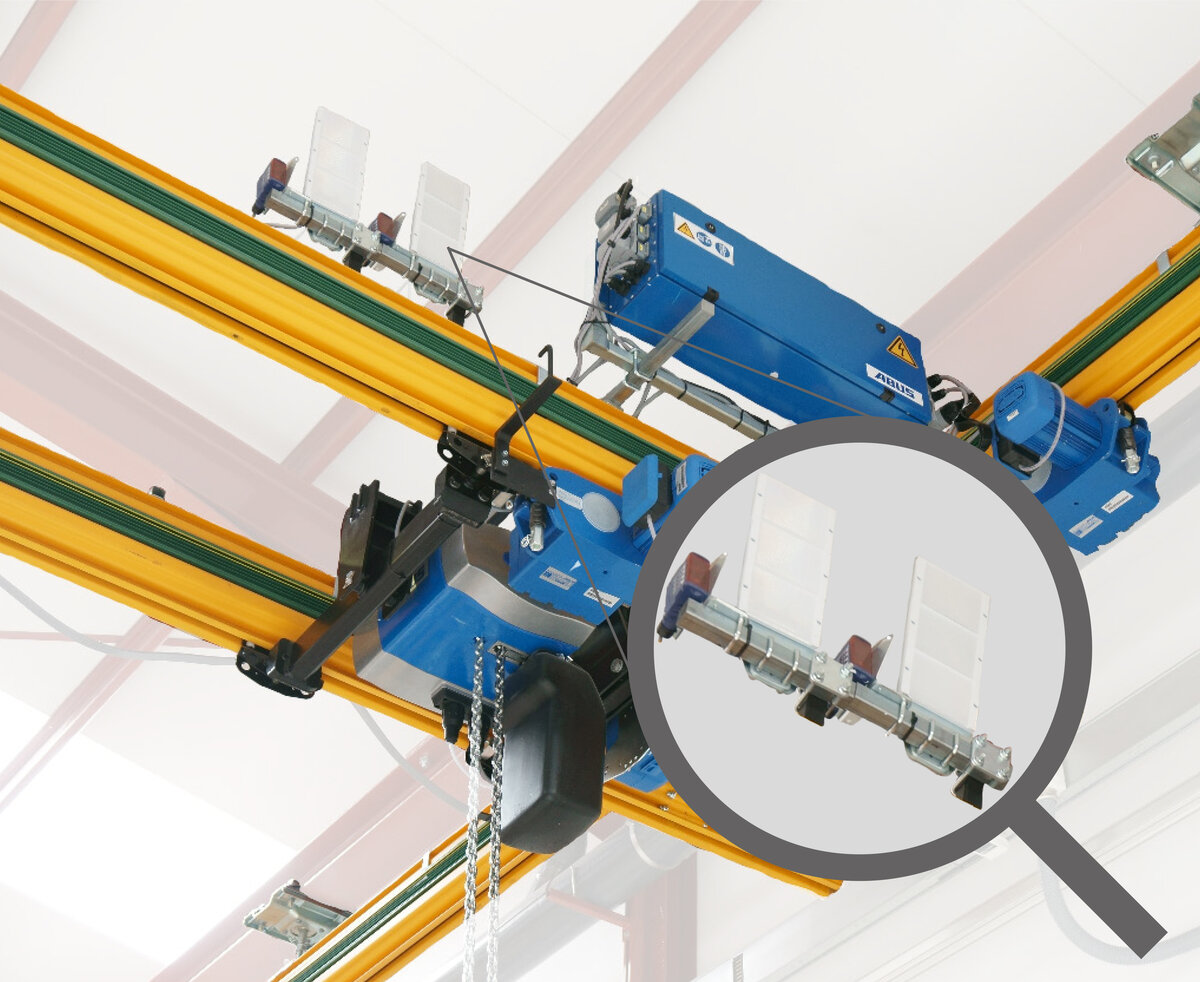
Ogranicznik ruchu do torowisk HB
Ogranicznik ruchu do napędu jazdy wózka (poprzecznej)
- dostępny do wszystkich systemów HB wyposażonych w elektryczny napęd jazdy dźwignicy (do systemów ze sterownikiem radiowym zawarty w standardowym zakresie dostawy)
Ogranicznik ruchu do napędu jazdy suwnicy (poprzecznej)
- Wyłączenie wstępne do małej prędkości jazdy suwnicy przed dojściem do końca dźwigara. Ruch jazdy w przeciwnym kierunku jest możliwy z dużą prędkością jazdy suwnicy.
- Oprócz wyłączenia wstępnego do małej prędkości jazdy można zrealizować także wyłączenie krańcowe przed dojściem do końca dźwigara . Ruch jazdy w przeciwnym kierunku jest możliwy z dużą prędkością jazdy.
- Jako wyposażenie dodatkowe potrzebny jest sterownik stycznikowy.
- dostępny do wszystkich systemów HB wyposażonych w elektryczny napęd jazdy dźwignicy (do systemów ze sterownikiem radiowym zawarty w standardowym zakresie dostawy)
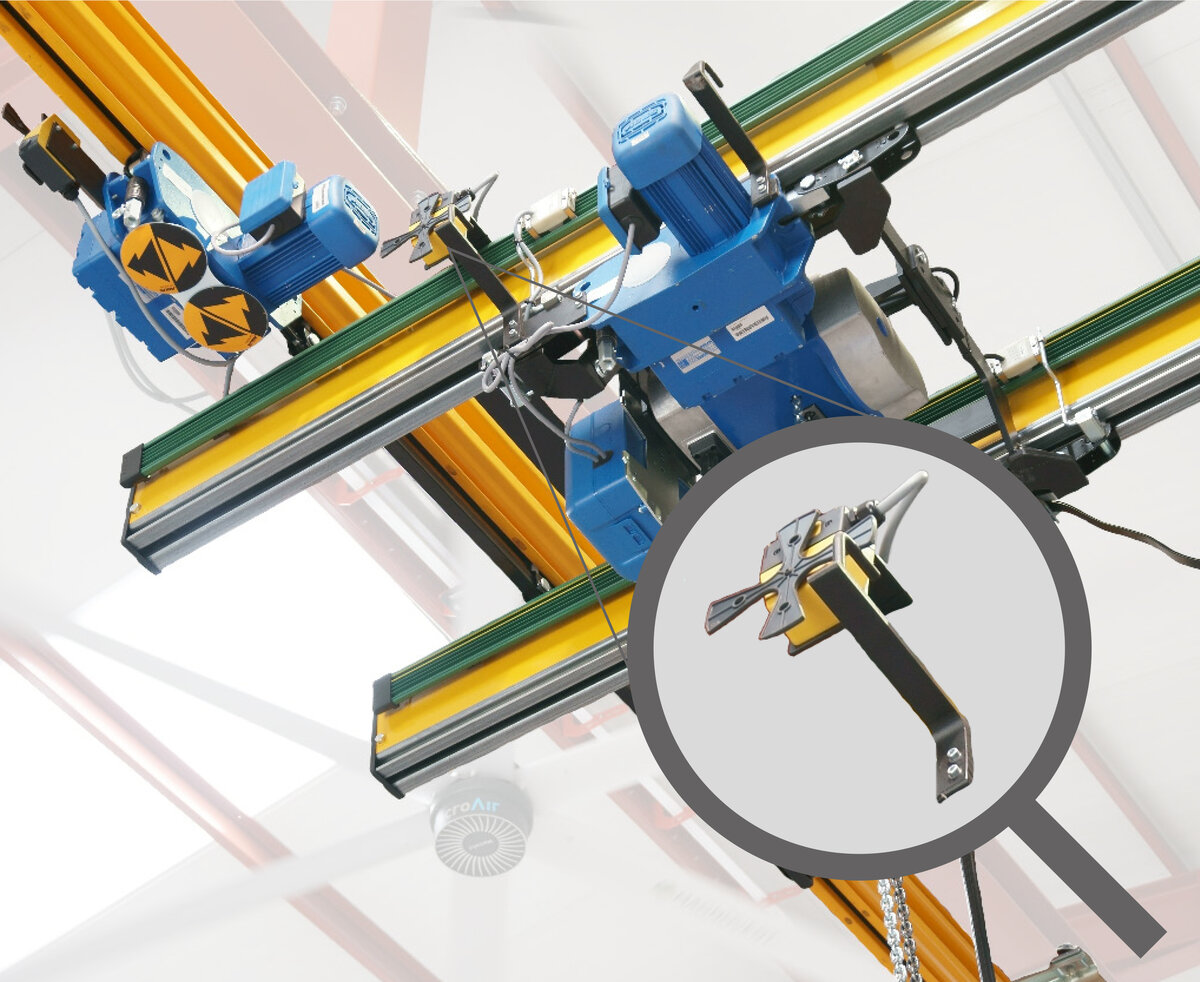
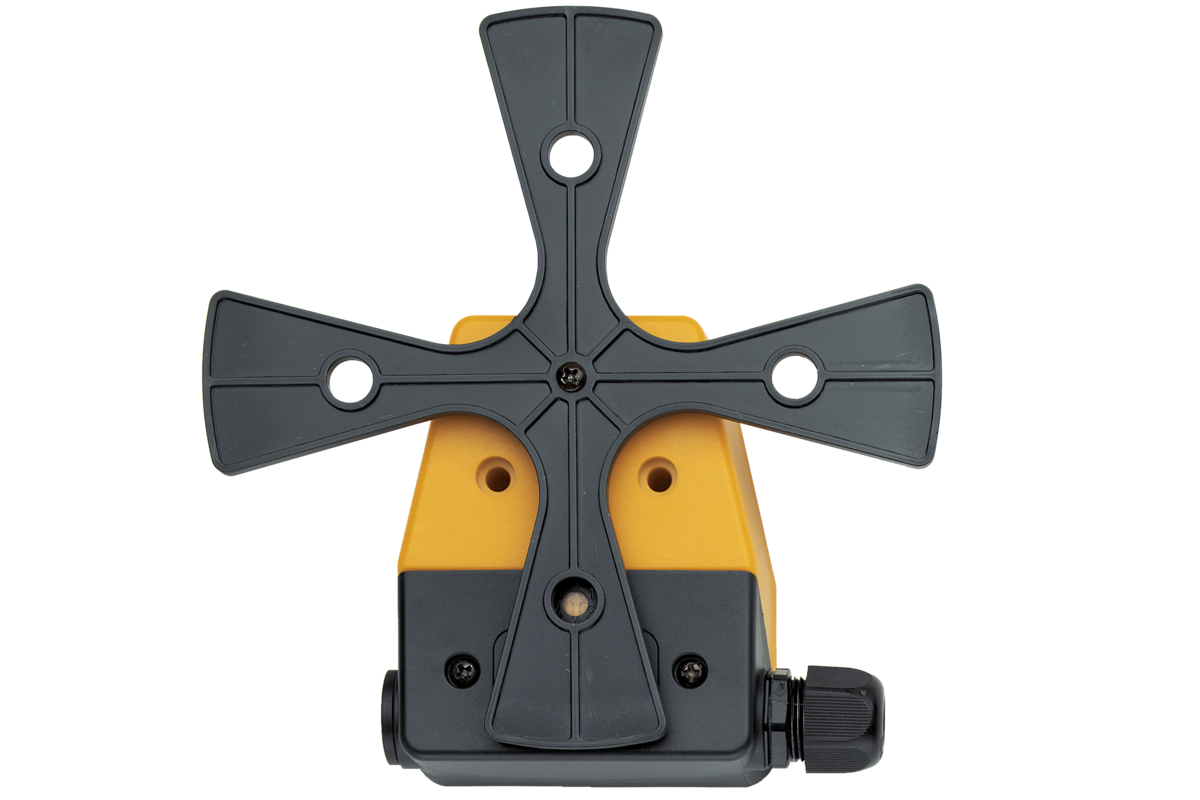
Fotoelektroniczny system antykolizyjny do sąsiednich suwnic
- Jeżeli po jednym torowisku przejeżdża więcej niż jedna suwnica z elektrycznym napędem jazdy , radzimy zastosowanie fotoelektronicznego systemu antykolizyjnego. Daje to lepsze zabezpieczenie przed ewentualną przypadkową kolizją dwóch dźwignic.
- System antykolizyjny może składać się z dwóch stopni wysterowania. Wyłączenia wstępnego do małej prędkości jazdy suwnicy przed dojściem do suwnicy współpracującej. Ruch jazdy w przeciwnym kierunku jest możliwy z dużą prędkością jazdy suwnicy.
- Oprócz wyłączenia wstępnego do małej prędkości jazdy można zrealizować także wyłączenie krańcowe przed dojściem do sąsiedniej suwnicy . Ruch jazdy w przeciwnym kierunku jest możliwy z dużą prędkością jazdy.
- Jako wyposażenie dodatkowe potrzebny jest sterownik stycznikowy.
- Odległość wyłączająca może być elastycznie ustawiana. Odległość między suwnicami nie może być większa niż 20 metrów
-
dostępny do wszystkich systemów HB wyposażonych w elektryczny napęd jazdy dźwignicy (do systemów złożonych z kilku belek głównych i przy zastosowaniu sterownika radiowego zawarty w standardowym zakresie dostawy)
System objazdowy do napędów jazdy wózka (poprzecznej) i jazdy żurawia (wzdłużnej)
- Jeżeli przeszkody w hali ograniczają pracę suwnicy, muszą one być objeżdżane. Proces ten jest kontrolowany i wspomagany przez system objazdowy.
- W odniesieniu do ruchu jazdy suwnicy i ruchu jazdy wózka definiowane są obszary, w których kontynuowanie ruchu jazdy jest niemożliwe (wyłączenie krańcowe). Te obszary muszą być objeżdżane w odpowiednio przeciwnym ruchu jazdy. Odpowiednio przeciwny ruch jazdy jest możliwy z dużą prędkością.
- Dla odpowiednio autoryzowanych operatorów może być przewidziana możliwość pominięcia systemu objazdowego za pomocą (zamykanego) przełącznika w module obsługowym. Funkcja ta może być także ograniczona do wolnej prędkości jazdy.
- Jako wyposażenie dodatkowe potrzebny jest sterownik stycznikowy.
- dostępne do wszystkich dźwignic podwieszanych wyposażonych w elektryczne napędy jazdy suwnicy i/lub wózka

Elektroniczny wyłącznik krańcowy podnoszenia
- wyłącznik graniczny podnoszenia jwat dostępny do wszystkich systemów HB ABUS